Na postagem anterior
foi tratada a primeira classe dos filtros digitais, agora nesse material será
tratada a segunda classe dos filtros digitais, filtros IIR
Filtros Digitais cuja
resposta ao impulso apresenta duração infinita (IIR – Infinite Impulse
Response)

que também pode ser reescrito como uma função racional com potências
negativas de z.
No filtro IIR as características de entrada e saída são regidas por
equações lineares de diferenças com coeficientes constantes de natureza recursiva,
conforme pode se observar na figura a seguir.
Observa-se
que no diagrama de blocos do filtro IIR, os termos , k=0,1,…,M , e os termos ,
j=1,…, N, são os termos da função de transferência Y(z)/X(z), normalizados pelo
termo b0 .
Diagrama de Blocos

Projeto de Filtros IIR
Uma das formas de projetos de filtros digitais do tipo IIR é através da
aproximação entre funções de transferências contínuas por funções de
transferências discretas equivalentes. Desta forma, considera-se a seguinte
aproximação em tempo discreto da função integração.

Aplicando na equação anterior o operador z, obtém-se:

implicando na seguinte aproximação:

De forma semelhante pode-se representar z em função de s, ou seja

Admitindo s=σ+jω pode-se definir regiões do Plano s e suas regiões equivalentes no Plano z.
Ou seja:

Portanto, tem-se:

Resultando nas seguintes propriedades para este
tipo de aproximação:
1. O semiplano esquerdo do Plano s é mapeado no
interior do círculo de raio unitário no Plano z;
2. O eixo jω é inteiramente mapeado sobre o
circulo de raio unitário do Plano z;
3. O semiplano direito do Plano s é mapeado no
exterior do círculo de raio unitário no Plano z.

Uma implicação
imediata da propriedade 1 é que se o filtro analógico representado pela função
de transferência Ha(s) for estável e causal, o filtro digital dele derivado através
da transformação bilinear será garantidamente estável e causal.
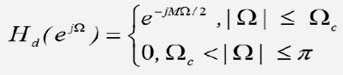
Para σ = 0, tem-se Ω =
2 tg-1(ωT/2), concluindo-se que a faixa de frequência -∞ < ω < ∞, é
comprimida em uma faixa finita de frequências contida no intervalo –π < Ω
< π de um filtro digital. Esta forma de distorção não linear é conhecida
como warping.
Tal distorção de fase
pode ser compensada no projeto do filtro analógico através de um procedimento
denominado pré-warping. Especificamente, para as frequências críticas
(frequências de corte para a faixa de passagem e de rejeição), o procedimento
de pré-warping é realizado de acordo com a relação:

Exemplo
Usando um filtro
analógico com uma função de transferência de Butterworth de ordem 3, projetar
um filtro IIR passa baixas com frequência de corte Ωc= 0.2π .
Projetos de Filtros IIR – Curva de Magnitude

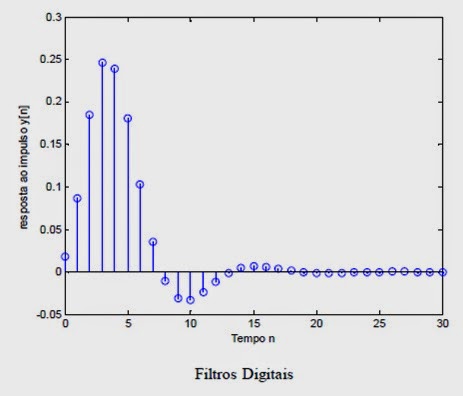
Projetos de Filtros IIR –
Resposta ao Impulso